What Problem Is Being Addressed?
The Polarity Modeling Framework (PMF) defines transformation as a primitive structural relation between configurations. This is important because AuI systems must represent change before they can reason about behavior, adaptation, memory, events, prediction, or control.
Currently the PMF states that transformation can be defined independently of time. That claim requires refinement. In practical language, many transformations appear to happen over time. A person walks from the bedroom to the kitchen. A sensor detects motion for several seconds. A policy evaluation completes before an alert is sent. A personal event recognition system logs a bathroom event after detecting a sequence of motion, sound, and water-use signals. These examples involve ordering, duration, rate, and synchronization.
There are two types of errors PMF must avoid. The first is to make clock time primitive and then define transformation as merely a change in state over time. That would make the framework dependent on time-indexed models and would obscure the deeper structure of transformation, dependency, and configuration change. The second error is to say that time is merely derived, while failing to specify how duration, rate, simultaneity, synchronization, and logging are handled in real AuI implementations.
This post introduces a revision to address this gap. PMF should not say simply that time is emergent and leave the rest implicit. Instead, it should distinguish between transformation structure and temporal projection. Transformation defines what changes and what depends on what. Temporal projection defines how those transformations are assigned ordering, duration, rate, synchronization, and timestamps for implementation, analysis, logging, and coordination.
This distinction preserves the PMF insight while making it operationally defensible. It allows PMF to remain structurally prior to time-indexing while still supporting systems that must use clocks, schedules, durations, rates, event logs, and synchronization protocols.
The Core Revision
The revised position is:
PMF defines transformation independently of time indexing, but real AuI systems require temporal projection to assign ordering, duration, rate, synchronization, and logging structure to transformations.
This means that PMF now separates two layers.
The first layer is transformation structure. This layer includes configurations, transformations, dependency, partial order, admissibility, regions, fields, knowledge, mappings, and regulation. It describes the structural organization of change without assuming a clock or global timeline.
The second layer is temporal projection. This layer maps transformation structures into a temporal reference structure. It supports practical implementation requirements such as duration assignment, clock timestamps, partial-order scheduling, rate models, synchronization across worlds, and event logging.
This separation is best understood as a modeling discipline. PMF does not eliminate clock time from implementation. It also does not make clock time the primitive basis of transformation. Transformation is structural. Time is projected onto transformation structure when a system requires temporal interpretation.
A compact formulation is:
Transformation defines change. Temporal projection describes that change in time.
Transformation as Structural Change
Within PMF, a transformation maps one configuration to another:
T: configuration → configuration’
A configuration is the structured state of the system within a field. A transformation is a structured relation between configurations. It may preserve region membership, cross a region boundary, activate knowledge, modify coupling, trigger an event, or require regulatory evaluation.
This definition does not require time. It does not say when the transformation occurs or how long it takes. It only says that one structured configuration is related to another through a change that is meaningful within the system.
This is essential because many forms of ordering do not require clock time. A transformation may depend on another transformation because its input configuration is produced by that prior transformation. A decision may depend on an observation. An action may depend on a policy evaluation. A log entry may depend on an event recognition. These dependencies create order before they create time.
In this sense, PMF treats dependency as structurally prior to temporal sequence. If transformation (T_2) depends on the result of transformation (T_1), then (T_1) must precede (T_2) in the transformation structure. That relation can later be projected into clock time, but the dependency itself does not require a clock.
Ordering Without Primitive Time
A transformation system may contain sequences, branches, convergence, cycles, and partial orders. A simple sequence may be represented as:
T_n o … o T_2 o T_1
This represents a structured composition of transformations. The composition defines dependency and order, but not duration. It tells us that one transformation depends on the result of another. It does not yet tell us whether the sequence took one second, one minute, or one hour.
More complex systems may not be linear. Some transformations may be independent and therefore eligible to occur in parallel. Others may be dependent and therefore must be ordered. This is why partial order is important. PMF does not require all transformations to be arranged along a single global sequence. Instead, it allows transformation systems to represent dependency structures that may include concurrency, independence, and synchronization.
This is particularly important for edge-primary personal event recognition. A sensor node may detect motion while another detects sound. These transformations may be structurally independent until they are mapped into a shared event-recognition configuration. The system does not need to assume a single primitive temporal order for everything. It needs to know which transformations depend on which others, which can proceed independently, and which must be synchronized for event recognition or logging.
Temporal Projection as a First-Class Construct
The revision is to make temporal projection a first-class PMF construct.
A temporal projection maps a transformation system into a temporal reference structure:
tau: T_system -> T_reference
Here, “tau” is the name used for the temporal projection function. It represents the process or mechanism by which a system assigns temporal interpretation to transformations. In practical terms, tau determines how transformations are associated with ordering, duration, timestamps, scheduling, synchronization, or other temporal relationships.
Here, T_system represents a transformation system and T_reference represents a temporal reference structure. The temporal reference structure is not assumed to be only the real number line. Different AuI implementations may require different temporal models. In some cases, the temporal model may be continuous clock time. In others, it may be discrete event steps, a partially ordered event structure, an interval model, logical clocks, or a distributed synchronization model.
At minimum, a temporal reference structure must support ordering and duration. It must allow the system to represent that one transformation precedes another when dependency requires it. It must also allow the system to assign or estimate the extent of a transformation when duration matters. More advanced implementations may also require uncertainty, tolerance ranges, synchronization constraints, rate models, or multiple clocks.
Temporal projection therefore provides the bridge between structural transformation and implementation time. It does not replace transformation. It annotates, schedules, measures, or coordinates transformations according to a temporal model appropriate to the system.
Coherence Conditions for Temporal Projection
Temporal projection must be coherent with transformation structure. It cannot assign time arbitrarily. Several conditions are required.
First, temporal projection must preserve dependency order. If transformation (T_2) depends on transformation (T_1), then the temporal projection must not place (T_2) before the completion of the part of (T_1) required by that dependency. The exact requirement may depend on the dependency type. Some transformations may require full completion. Others may require only the availability of an intermediate configuration.
Second, temporal projection must assign or support duration. A transformation may be instantaneous at the structural level, but in implementation it may require time to execute, observe, confirm, communicate, or log. Duration is therefore not primitive to transformation, but it may be necessary for implementation.
Third, temporal projection must respect parallel compatibility. If two transformations are structurally independent, they may be projected as concurrent, overlapping, or sequential. The transformation structure permits concurrency, but implementation constraints determine whether concurrency is allowed.
Fourth, temporal projection must respect resource constraints. Even if two transformations are structurally independent, they may compete for a processor, sensor, actuator, network channel, memory resource, policy evaluator, or human attention. Resource constraints can prevent parallel execution even when the transformation graph permits it.
Fifth, temporal projection must support synchronization across worlds where needed. If transformations in different worlds must be compared, coordinated, fused, or logged together, their temporal projections must satisfy cross-world synchronization constraints.
These conditions convert the statement “time is derived” into a usable modeling claim. Time is not merely declared emergent. It is projected from transformation structure under explicit coherence constraints.
Duration as a Constrained Estimate
Duration requires special treatment. In practical systems, duration may come from multiple sources: observed clock time, predictive rate models, prior executions, or system policy. These sources may disagree.
PMF should therefore treat duration as a constrained estimate rather than as a primitive fixed value.
For a transformation (T), duration may be represented as an admissible range or set:
duration(T) belongs to admissible_duration_set(T)
Each source contributes constraints. Clock observation may provide measured duration. A rate model may provide expected duration. Prior executions may provide learned ranges or distributions. Policy may provide limits, thresholds, or deadlines.
These sources are reconciled through regulation. Regulation does not need to prescribe the same resolution rule for every domain. Instead, PMF specifies the constraint space in which duration assignment occurs. A computational implementation must define how conflicting duration constraints are resolved, but the result must remain coherent with dependency, admissibility, resource constraints, synchronization requirements, and system policy.
This prevents a regress. PMF does not need to define every possible conflict-resolution strategy. It must define the structural location of the conflict, the kinds of constraints involved, and the requirement that resolution occur within an admissible constraint space. Domain-specific implementations then define the policy by which observation, prediction, history, and policy constraints are reconciled.
Synchronization Across Worlds
Synchronization also requires more careful treatment than simply calling it a cross-world mapping. In PMF, a world is a structured domain organized around a polarity axis. Different worlds may represent distinct domains such as perception, control, environment interaction, internal evaluation, logging, or policy. Each world may maintain its own transformation structure and temporal projection.
Synchronization is a constraint relating temporal projections across worlds.
If world A has temporal projection:
tau_A: T_system_A -> T_reference_A
and world B has temporal projection:
tau_B: T_system_B -> T_reference_B
then synchronization requires a constraint:
This constraint may define alignment, allowable delay, ordering, tolerance, simultaneity, or correspondence between transformations in different worlds. The worlds do not need to contain primitive time. Instead, each may project its transformations into temporal structures, and synchronization constrains how those projections relate.
This avoids circularity. Simultaneity is not assumed as a primitive cross-world relation. It is introduced when temporal projections satisfy a synchronization constraint. A system may treat two transformations as simultaneous if their projections fall within a specified tolerance under a shared or coordinated temporal reference structure.
For edge-primary personal event recognition, this is essential. A bathroom-use event may require motion, water sound, and location evidence from different sensor worlds. These signals need not be generated by one global time primitive. They can be recognized as part of the same event if their temporal projections satisfy synchronization constraints defined by the event-recognition model.
The Transformation–Temporal–Regulatory Decomposition
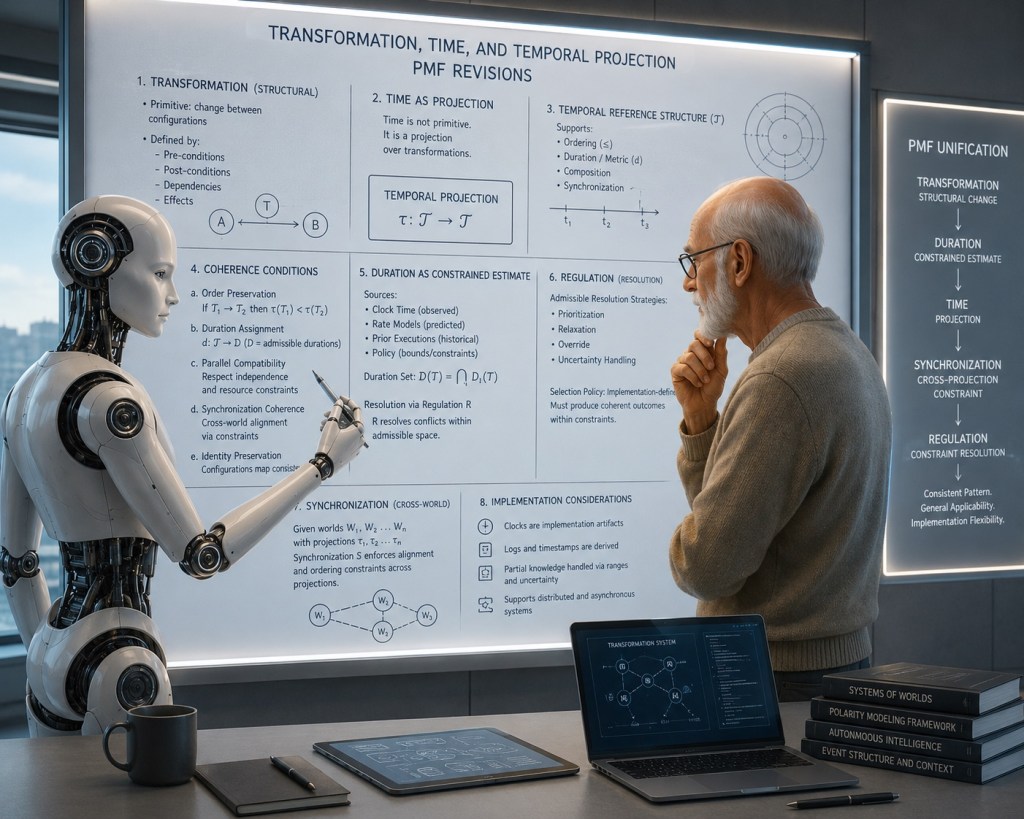
The revised framework can be summarized as follows:
| Concept | Role |
|---|---|
| Transformation | Structural change between configurations |
| Duration | Constrained estimate assigned to transformations |
| Time | Projection over transformation structure |
| Synchronization | Constraint relating temporal projections |
| Regulation | Constraint resolution over admissible structures |
This decomposition is central. It clarifies that PMF separates the structural basis of change from the temporal models used to measure, schedule, synchronize, and log that change.
This is the disciplined position:
Time is structurally projected, not structurally primitive.
Why This Matters for OAII
OAII is concerned with open, interoperable, transparent, and accountable AuI. Temporal representation is central to all of these goals.
For interoperability, systems need to exchange event and transformation records in ways that are not tied to one implementation’s internal clock model. Temporal projection allows different systems to preserve transformation structure while using different temporal reference structures.
For transparency, logs should record not only timestamps, but the transformations being timestamped, the dependencies among them, the duration assumptions used, and any synchronization constraints applied.
For accountability, system behavior should be traceable from configuration through transformation, event representation, temporal projection, regulatory evaluation, and log record. This makes it possible to ask not merely when something happened, but what changed, what it depended on, how it was temporally interpreted, and whether that interpretation satisfied system constraints.
For certification, systems may be evaluated based on whether temporal projections preserve dependency order, respect resource and synchronization constraints, and correctly distinguish structural transformation from implementation timing.
Edge-Primary Personal Event Recognition Example
Consider an edge-primary personal event recognition system operating in a home environment. A bathroom event may involve motion near the bathroom, a door state change, water-use sound, and a short interval of reduced hallway movement.
At the transformation-structure layer, the system represents configurations and transformations across several worlds: sensor worlds, location worlds, event-recognition worlds, policy worlds, and logging worlds. Motion detection is a transformation. Sound classification is a transformation. Location update is a transformation. Event inference is a transformation. Logging is a transformation.
These transformations have dependencies. Event inference may depend on the availability of motion, sound, and location configurations. Logging may depend on event inference. Notification may depend on policy evaluation. These dependencies define order without requiring time as primitive.
At the temporal-projection layer, the system assigns observed times, estimated durations, and synchronization constraints. Motion and sound may count as part of the same candidate event only if their projections fall within an admissible time window. A notification may be delayed or suppressed depending on policy. A log entry may record both the event timestamp and the dependency structure that justified the event.
Regulation evaluates the full structure. It determines whether the event inference is admissible, whether the synchronization window is satisfied, whether missing evidence weakens confidence, and whether the event should be logged, ignored, escalated, or recontextualized.
This example shows why the revision matters. A timestamp alone is not enough. The system needs transformation structure, temporal projection, synchronization constraints, and regulation.
Careful Use of Physical Analogies
Earlier discussion sometimes compared this approach to ideas from physics, especially geometric treatments of time. Such analogies should be used carefully. PMF is not making a physical claim about spacetime, nor does it rely on relativity to validate the framework.
The useful analogy is methodological, not physical. PMF observes that temporal descriptions may depend on the structure used to represent relations among events. That is enough. The framework should not claim that PMF time is equivalent to physical time, or that relativity treats time as emergent from change in the same way PMF treats temporal projection.
The cautious formulation is:
PMF is not a theory of physical time. It is a structural modeling framework in which temporal descriptions of system behavior are assigned through projections over transformation structures.
Next Steps
The transformation/time revision strengthens PMF Paper 3 by replacing a broad claim with a more precise framework. The next step is to develop this into a dedicated paper section on Temporal Projection and Implementation Time. That section should define temporal projection, characterize admissible temporal reference structures, specify coherence conditions, explain duration as a constrained estimate, and define synchronization as a cross-projection constraint.
A following paper or subsection should address the related but distinct regress problem. Temporal projection introduces duration estimates, synchronization constraints, and conflict resolution requirements. At some point the framework must specify where PMF stops and implementation policy begins. The emerging answer is that PMF defines admissible constraint spaces and structural coherence requirements, while implementation-specific regulation determines resolution policies within those spaces.
This distinction matters beyond time. It provides a general method for formalizing PMF constructs. Mapping, regulation, and knowledge can be treated using the same pattern: define the structural construct, identify the constraint space, specify projection or realization mechanisms, and locate regulatory resolution without over-prescribing domain-specific policy.
In that sense, the transformation/time revision is more than a fix to one paper. It establishes a repeatable discipline for the whole framework: structural definition first, projection and realization second, regulation over constraints third, implementation policy last.

Leave a comment